It is most suitable for a wide range of applications such as joints or rotating parts of industrial robots, rotating tables of machining centers, rotating parts of manipulators, precision rotating tables, medical instruments, measuring instruments, and IC manufacturing equipment. It mainly includes two types of synchronous belts for industrial robots, one is equal-section thin-walled synchronous belts, and the other is cross-cylindrical roller synchronous belts.
OFweek Robot Network News: As one of the key accessories of industrial robots, the synchronous belt of industrial robots is most suitable for joints or rotating parts of industrial robots, rotating tables of machining centers, rotating parts of manipulators, precision rotating tables, medical instruments , Measuring instruments, IC manufacturing equipment and other widely used. It mainly includes two types of synchronous belts for industrial robots, one is equal-section thin-walled synchronous belts, and the other is cross-cylindrical roller synchronous belts. In addition, there are harmonic reducer synchronous belts, linear synchronous belts, joint synchronous belts, etc., but mainly the first two synchronous belts.
Features of synchronous belts for industrial robots: 1. Can withstand comprehensive loads in axial, radial and overturning directions; 2. Thin-walled synchronous belts; 3. High rotational positioning accuracy. Any timing belt that can meet this design requirement can be used in industrial robot arms, rotary joints, chassis, etc.
Classification of synchronous belts for industrial robots:
1.
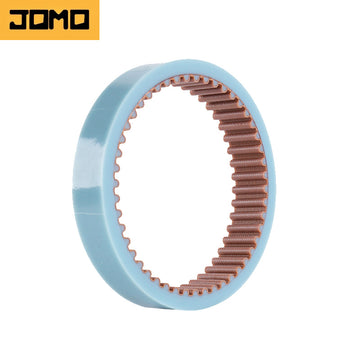
The characteristics of cross roller synchronous belts: cross roller synchronous belts are cylindrical rollers or tapered rollers passing through spacers on the 90-degree V-shaped groove rolling surface They are arranged perpendicular to each other, so the cross roller synchronous belt can bear multi-directional loads such as radial load, axial load and moment load. The size of the inner and outer rings is miniaturized, and the extremely thin form is even closer to the limit of small size, and has high rigidity, and the precision can reach P5, P4, and P2 levels. Therefore, it is suitable for joints and rotating parts of industrial robots, rotating tables of machining centers, precision rotating tables, medical equipment, calculators, military industry, IC manufacturing equipment and other equipment.
1. Excellent rotation accuracy:
The internal structure of the cross roller synchronous belt adopts rollers arranged vertically and intersecting each other at 90°, and spacers or spacers are installed between the rollers, which can prevent the tilting of the rollers and rub each other between the rollers, effectively preventing the rotation increase in torque. In addition, there will be no one-sided contact phenomenon or locking of the rollers; at the same time, because the inner and outer rings are divided, the gap can be adjusted, and high-precision rotary motion can be obtained even if preload is applied.
2. Simplified operation and installation:
The outer ring or inner ring that is divided into two parts is fixed together after being loaded with rollers and cages, so the operation during installation is very simple.
3. To withstand large axial and radial loads:
because the rollers are vertically arranged on the 90° V-groove rolling surface through spacers, this design enables the cross-roller synchronous belt to withstand relatively large loads. Loads in all directions, such as large radial loads, axial loads, and moment loads
OFweek Robot Network News: As one of the key accessories of industrial robots, the synchronous belt of industrial robots is most suitable for joints or rotating parts of industrial robots, rotating tables of machining centers, rotating parts of manipulators, precision rotating tables, medical instruments , Measuring instruments, IC manufacturing equipment and other widely used. It mainly includes two types of synchronous belts for industrial robots, one is equal-section thin-walled synchronous belts, and the other is cross-cylindrical roller synchronous belts. In addition, there are harmonic reducer synchronous belts, linear synchronous belts, joint synchronous belts, etc., but mainly the first two synchronous belts.
Features of synchronous belts for industrial robots: 1. Can withstand comprehensive loads in axial, radial and overturning directions; 2. Thin-walled synchronous belts; 3. High rotational positioning accuracy. Any timing belt that can meet this design requirement can be used in industrial robot arms, rotary joints, chassis, etc.
Classification of synchronous belts for industrial robots:
1.
The characteristics of cross roller synchronous belts: cross roller synchronous belts are cylindrical rollers or tapered rollers passing through spacers on the 90-degree V-shaped groove rolling surface They are arranged perpendicular to each other, so the cross roller synchronous belt can bear multi-directional loads such as radial load, axial load and moment load. The size of the inner and outer rings is miniaturized, and the extremely thin form is even closer to the limit of small size, and has high rigidity, and the precision can reach P5, P4, and P2 levels. Therefore, it is suitable for joints and rotating parts of industrial robots, rotating tables of machining centers, precision rotating tables, medical equipment, calculators, military industry, IC manufacturing equipment and other equipment.
1. Excellent rotation accuracy:
The internal structure of the cross roller synchronous belt adopts rollers arranged vertically and intersecting each other at 90°, and spacers or spacers are installed between the rollers, which can prevent the tilting of the rollers and rub each other between the rollers, effectively preventing the rotation increase in torque. In addition, there will be no one-sided contact phenomenon or locking of the rollers; at the same time, because the inner and outer rings are divided, the gap can be adjusted, and high-precision rotary motion can be obtained even if preload is applied.
2. Simplified operation and installation:
The outer ring or inner ring that is divided into two parts is fixed together after being loaded with rollers and cages, so the operation during installation is very simple.
3. To withstand large axial and radial loads:
because the rollers are vertically arranged on the 90° V-groove rolling surface through spacers, this design enables the cross-roller synchronous belt to withstand relatively large loads. Loads in all directions, such as large radial loads, axial loads, and moment loads